



Research Interests
Research Highlights
Selected Publications
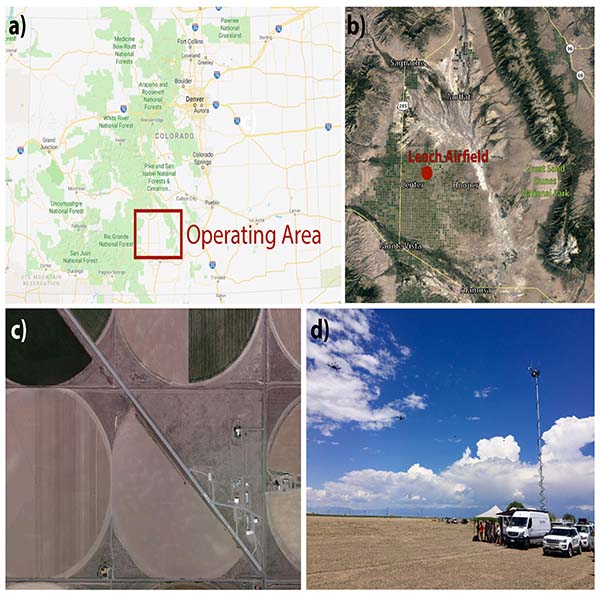
Coordinated unmanned aircraft system (UAS) and ground-based weather measurements to predict lagrangian coherent structures (LCSs)


Concentrations of airborne chemical and biological agents from a hazardous release are not spread uniformly. Instead, there are regions of higher concentration, in part due to local atmospheric flow conditions which can attract agents. We equipped a ground station and two rotary-wing unmanned aircraft systems (UASs) with ultrasonic anemometers. Flights reported here were conducted...
Full Citation:
"Coordinated unmanned aircraft system (UAS) and ground-based weather measurements to predict lagrangian coherent structures (LCSs)" P. J. Nolan, J. Pinto, J. González-Rocha, A. Jensen, C. N. Vezzi, S. C. C. Bailey, G. de Boer, C. Diehl, R. Laurence III, C. W. Powers, H. Foroutan, S. D. Ross, D. G. Schmale III. Sensors, 18(2), 4448, https://doi.org/10.3390/s18124448
Sensing wind from quadrotor motion

Full Citation:
"Sensing wind from quadrotor motion" J. González-Rocha, C. A. Woolsey, C. Sultan, and S. F. J. De Wekker. AIAA Journal of Guidance, Control, and Dynamics, 42(4), 836-852, https://doi.org/10.2514/1.G003542
Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign
Full Citation:
"Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign" L. Barbieri, S. T. Kral, S. C. C. Bailey, A. E. Frazier, J. D. Jacob, J. Reuder, D. Brus, P. B. Chilson, C. Crick, C. Detweiler, A. Doddi, J. Elston, H. Foroutan, J. González-Rocha, B. R. Greene, M. I. Guzman, A. L. Houston, A. Islam, O. Kemppinen, D. Lawrence, E. A. Pillar-Little, S. D. Ross, M. Sama, D. G. Schmale III, T. J. Schuyler, A. Shankar, S. W. Smith, S. Waugh, C. Dixon, S. Borenstein, and G. de Boer. Sensors, 19(9), 2179, https://doi.org/10.3390/s19092179
Wind profiling in the lower atmosphere from wind-induced perturbations to multirotor UAS
Full Citation:
"Wind profiling in the lower atmosphere from wind-induced perturbations to multirotor UAS" J. González-Rocha, S. F. J. De Wekker, S. D. Ross, and C. A. Woolsey. Sensors, 5, 1341, https://doi.org/10.3390/s20051341
Multirotor-assisted measurements of wind induced drift of objects in aquatic environments

Full Citation:
"Multirotor-assisted measurements of wind induced drift of objects in aquatic environments" J. González-Rocha, A. Sosa, R. Hanlon, A. A. Allen, I. Rypina, David G. Schmale III, and S. D. Ross. Applied Ocean Research, 110, 102538, https://doi.org/10.1016/j.apor.2021.102538

